Главная
Лекция
3. Расчет ферм. Трение скольжения и качения.
В данной лекции
рассматриваются следующие вопросы
1.
Расчет ферм.
2.
Понятие о ферме.
3.
Аналитический расчет плоских ферм.
4. Графический
расчет плоских ферм.
5.
Трение.
6.
Законы трения скольжения.
7.
Реакции шероховатых связей.
8.
Угол трения.
9.
Равновесие при наличии трения.
10.
Трение качения и верчения.
11.
Момент силы относительно центра как вектор.
12.
Момент пары сил как вектор.
13.
Момент силы относительно оси.
14.
Зависимость между моментами силы относительно центра и относительно оси.
15.
Приведение пространственной системы сил к данному центру.
16.
Условия равновесия произвольной пространственной системы сил.
17.
Задачи на равновесие тела под действием пространственной системы сил.
Изучение данных вопросов необходимо в
дальнейшем для изучения динамики движении тел с учетом трения скольжения и
трения качения, динамики движения центра масс механической системы,
кинетических моментов, для решения задач в дисциплине «Сопротивление
материалов».
Расчет
ферм. Понятие о ферме. Аналитический расчет плоских ферм.
Фермой называется жесткая конструкция из прямолинейных стержней, соединенных
на концах шарнирами. Если все стержни фермы лежат в одной плоскости, ферма
называется плоской. Места соединения стержней фермы называют узлами. Все
внешние нагрузки к ферме прикладываются только в узлах. При расчете фермы
трением в узлах и весом стержней (по сравнению с внешними нагрузками)
пренебрегают или распределяют веса стержней по узлам. Тогда на каждый из
стержней фермы будут действовать две силы, приложенные к его концам, которые
при равновесии могут быть направлены только вдоль стержня. Следовательно, можно
считать, что стержни фермы работают только на растяжение или на сжатие. Ограничимся
рассмотрением жестких плоских ферм, без лишних стержней, образованных из
треугольников. В таких фермах число стержней k и число узлов n связаны соотношением
k=2n-3.
Расчет фермы сводится к определению опорных реакций
и усилий в ее стержнях.
Опорные реакции можно найти
обычными методами статики, рассматривая ферму в целом как твердое тело.
Перейдем к определению усилий в стержнях.
Метод вырезания узлов. Этим методом удобно пользоваться, когда надо найти
усилия во всех стержнях фермы. Он сводится к последовательному рассмотрению
условий равновесия сил, сходящихся в каждом из узлов фермы. Ход расчетов
поясним на конкретном примере.
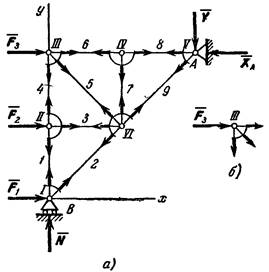
Рис.1
Рассмотрим изображенную на
рис. 1,а ферму, образованную из одинаковых равнобедренных прямоугольных
треугольников; действующие на ферму силы параллельны оси х и равны: F1 = F2 = F3 = F = 2.
В этой ферме число узлов
n = 6, а число стержней k = 9. Следовательно, соотношение выполняется
и ферма является жесткой, без лишних стержней.
Составляя уравнения равновесия
для фермы в целом, найдем, что реакции опор направлены, как показано на рисунке,
и численно равны;
XA=3F=6 H.
YA=N=3/2F=3 H.
Переходим к определению
усилий в стержнях.
Пронумеруем узлы фермы
римскими цифрами, а стержни — арабскими. Искомые усилия будем обозначать S1 (в стержне 1), S2 (в стержне 2) и т. д.
Отрежем мысленно все узлы вместе со сходящимися в них стержнями от остальной
фермы. Действие отброшенных частей стержней заменим силами, которые будут
направлены вдоль соответствующих стержней и численно равны искомым усилиям S1, S2, ... Изображаем сразу все
эти силы на рисунке, направляя их от узлов, т. е. считая, все стержни растянутыми
(рис. 1,а; изображенную картину надо представлять себе для каждого узла
так, как это показано на рис. 1,б для узла III). Если в результате
расчета величина усилия в каком-нибудь стержне получится отрицательной, это
будет означать, что данный стержень не растянут, а сжат. Буквенных обозначений
для сил, действующих вдоль стержней, ни рис. 23 не вводам, поскольку ясно, что
силы, действующие вдоль стержня 1, равны численно S1, вдоль стержня 2 — равны S2 и т. д.
Теперь для сил, сходящихся
в каждом узле, составляем последовательно уравнения равновесия
![]()
Начинаем
с узла 1, где сходятся два стержня, так как из двух уравнений равновесия можно
определить только два неизвестных усилия.
Составляя уравнения равновесия для узла 1, получим
F1+S2cos450=0, N+S1+S2sin450=0.
Отсюда находим
![]()
![]()
Теперь, зная S1, переходим к узлу II.
Для него уравнения равновесия дают
S3+F2=0, S4-S1=0,
откуда
S3=-F=-2 H, S4=S1=-1 H.
Определив S4, составляем аналогичным
путем уравнения равновесия сначала для узла III, а затем для узла IV. Из
этих уравнений находим:
![]()
Наконец, для вычисления S9 составляем уравнение
равновесия сил, сходящихся в узле V, проектируя их на ось By.
Получим YA+S9cos450=0 откуда ![]()
Второе уравнение равновесия
для узла V и два уравнения для узла VI можно составить как поверочные. Для нахождения
усилий в стержнях эти уравнения не понадобились, так как вместо них были
использованы три уравнения равновесия всей фермы в целом при определении N, ХА,
и YА.
Окончательные результаты
расчета можно свести в таблицу:
|
№ стержня |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Усилие в Н |
-1 |
-2,82 |
-2 |
-1 |
+1,41 |
-3 |
0 |
-3 |
-4,23 |
Как показывают знаки
усилий, стержень 5 растянут, остальные стержни сжаты; стержень 7 не нагружен
(нулевой, стержень).
Наличие в ферме нулевых стержней,
подобных стержню 7, обнаруживается сразу, так как если в узле, не нагруженном
внешними силами, сходятся три стержня, из которых два направлены вдоль одной
прямой, то усилие в третьем стержне равно нулю. Этот результат получается из
уравнения равновесия в проекции на ось, перпендикулярную к упомянутым двум
стержням.
Если в ходе расчета
встретится узел, для которого число неизвестных больше двух, то можно
воспользоваться методом сечений.
Метод сечений (метод Риттера). Этим методом удобно пользоваться для определения
усилий в отдельных стержнях фермы, в частности, для проверочных расчетов. Идея
метода состоит в том, что ферму разделяют на две части сечением, проходящим
через три стержня, в которых (или в одном из которых) требуется определить усилие,
и рассматривают равновесие одной из этих частей. Действие отброшенной части
заменяют соответствующими силами, направляя их вдоль разрезанных стержней от
узлов, т. е. считая стержни растянутыми (как и в методе вырезания узлов).
Затем составляют уравнения равновесия, беря центры моментов (или ось проекций)
так, чтобы в каждое уравнение вошло только одно неизвестное усилие.
Графический
расчет плоских ферм.
Расчет фермы методом
вырезания узлов может производиться графически. Для этого сначала, определяют
опорные реакции. Затем, последовательно отсекая от фермы каждый из ее узлов,
находят усилия в стержнях, сходящихся в этих узлах, строя соответствующие
замкнутые силовые многоугольники. Все построения проводятся в масштабе, который
должен быть заранее выбран. Расчет начинают с узла, в котором сходятся два
стержня (иначе не удастся определить неизвестные усилия).

Рис.2
В качестве примера рассмотрим
ферму, изображенную на рис. 2,а. В этой ферме число узлов n = 6, а число стержней k = 9. Следовательно, соотношение выполняется
и ферма является жесткой, без лишних стержней. Опорные реакции ![]() и
и ![]() для рассматриваемой фермы, изображаем наряду
с силами
для рассматриваемой фермы, изображаем наряду
с силами ![]() и
и ![]() , как известные.
, как известные.
Определение усилий в
стержнях начинаем с рассмотрения стержней, сходящихся в узле I (узлы
нумеруем римскими цифрами, а стержни - арабскими). Мысленно отрезав от этих
стержней остальную часть фермы, отбрасываем ее действие
отброшенной части также мысленно заменяем силами ![]() и
и ![]() , которые должны
быть направлены вдоль стержней 1 и 2. Из сходящихся в узле I
сил
, которые должны
быть направлены вдоль стержней 1 и 2. Из сходящихся в узле I
сил ![]() ,
, ![]() и
и ![]() строим замкнутый треугольник (рис. 2,б).
Для этого изображаем сначала в выбранном масштабе известную силу
строим замкнутый треугольник (рис. 2,б).
Для этого изображаем сначала в выбранном масштабе известную силу ![]() , а затем проводим через ее
начало и конец прямые, параллельные стержням 1 и 2.
Таким путем будут найдены силы
, а затем проводим через ее
начало и конец прямые, параллельные стержням 1 и 2.
Таким путем будут найдены силы ![]() и
и ![]() , действующие на стержни 1
и 2. Затем рассматриваем равновесие стержней, сходящихся в узле II. Действие на эти стержни отброшенной части фермы мысленно заменяем
силами
, действующие на стержни 1
и 2. Затем рассматриваем равновесие стержней, сходящихся в узле II. Действие на эти стержни отброшенной части фермы мысленно заменяем
силами ![]() ,
, ![]() , и
, и ![]() ,
направленными вдоль соответствующих стержней; при этом сила
,
направленными вдоль соответствующих стержней; при этом сила ![]() нам известна, так как по равенству действия и
противодействия
нам известна, так как по равенству действия и
противодействия ![]() .
Построив из сил, сходящихся в узле II, замкнутый треугольник (начиная с силы
.
Построив из сил, сходящихся в узле II, замкнутый треугольник (начиная с силы ![]() ), найдем
величины S3 и S4 (в данном случае S4 = 0). Аналогично находятся
усилия в остальных стержнях. Соответствующие силовые многоугольники для всех
узлов показаны на рис. 2,б. Последний многоугольник (для узла VI) строится
для проверки, так как все входящие в него силы уже найдены.
), найдем
величины S3 и S4 (в данном случае S4 = 0). Аналогично находятся
усилия в остальных стержнях. Соответствующие силовые многоугольники для всех
узлов показаны на рис. 2,б. Последний многоугольник (для узла VI) строится
для проверки, так как все входящие в него силы уже найдены.
Из построенных
многоугольников, зная масштаб, находим величины всех усилий. Знак усилия в
каждом стержне определяется следующим образом. Мысленно вырезав узел по
сходящимся в нем стержням (например, узел III), прикладываем к обрезам
стержней найденные силы (рис. 3); сила, направленная от узла (![]() на рис. 3), растягивает стержень, а сила,
направленная к узлу (
на рис. 3), растягивает стержень, а сила,
направленная к узлу (![]() и
и ![]() на рис. 3) сжимает его.
на рис. 3) сжимает его.
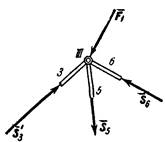
Рис.3
Согласно принятому
условию растягивающим усилиям приписываем знак «+», а сжимающим -
знак «-». В рассмотренном примере (pиc.3) стержни 1,
2, 3, 6, 7, 9 сжаты, а стержни 5, 8 растянуты.
Трение.
Почему звучит скрипичная струна, когда по ней ведут
смычком? Ведь смычок движется, а колебания струны периодические. А как
разгоняется автомобиль, и какая сила замедляет его при торможении? Почему
автомобиль «заносит» на скользкой дороге? Ответы на все эти и многие другие
важные вопросы, связанные с движением тел, дают законы трения.
Вы видите, как разнообразно и порой неожиданно
проявляется трение в окружающей нас обстановке. Трение принимает участие, и
притом весьма существенное, там, где мы о нём даже и не подозреваем. Если бы
трение внезапно исчезло из мира, множество обычных явлений протекало бы
совершенно иным образом.
Очень красочно пишет о роли трения французский физик Гильом:
«Всем нам случалось выходить в гололедицу; сколько усилий
стоило нам удерживаться от падения, сколько смешных движений приходилось нам
проделать, чтобы устоять! Это заставляет нас признать, что обычно земля, по
которой мы ходим, обладает драгоценным свойством, благодаря которому мы
сохраняем равновесие без особых усилий. Та же мысль возникает у нас, когда мы
едем на велосипеде по скользкой мостовой или когда лошадь скользит по асфальту
и падает. Изучая подобные явления, мы приходим к открытию тех следствий, к
которым приводит трение. Инженеры стремятся по возможности устранить его в
машинах – и хорошо делают. В прикладной механике о трении говорится как о
крайне нежелательном явлении, и это правильно, - однако лишь в узкой
специальной области. Во всех прочих случаях мы должны быть благодарны трению:
оно даёт нам возможность ходить, сидеть и работать без опасения, что книги и
чернильница упадут на пол, что стол будет скользить, пока не упрётся в угол, а
перо выскальзывать из пальцев.
Трение представляет настолько распространенное
явление, что нам, за редкими исключениями, не приходится призывать его на
помощь: оно является к нам само.
Трение способствует устойчивости. Плотники выравнивают
пол так, что столы и стулья остаются там, куда их поставили. Блюдца, тарелки, стаканы,
поставленные на стол, остаются неподвижными без особых забот с нашей стороны,
если только дело не происходит на пароходе во время качки.
Вообразим, что трение может быть устранено совершенно.
Тогда никакие тела, будь они величиною с каменную глыбу или малы, как песчинки,
никогда не удержатся одно на другом: всё будет скользить
и катиться, пока не окажется на одном уровне. Не будь трения, Земля
представляла бы шар без неровностей, подобно жидкому».
К этому можно прибавить, что при отсутствии трения гвозди
и винты выскальзывали бы из стен, ни одной вещи нельзя было бы удержать в
руках, никакой вихрь никогда бы не прекращался, никакой звук не умолкал бы, а
звучал бы бесконечным эхом, неослабно отражаясь, например, от стен комнаты.
Наглядный урок, убеждающий нас в огромной важности
трения, даёт нам всякий раз гололедица. Застигнутые ею на улице, мы оказываемся
беспомощными, и всё время рискуем упасть. Вот поучительная выдержка из газеты
(декабрь 1927 г.):
«Лондон, 21. Вследствие сильной гололедицы уличное и
трамвайное движение в Лондоне сильно затруднено. Около 1400 человек поступило в
больницы с переломами рук, ног и т. д.».
«При столкновении вблизи Гайд-Парка трёх автомобилей и
двух трамвайных вагонов машины были уничтожены из-за взрыва бензина…»
«Париж, 21. Гололедица в Париже и его пригородах
вызвала многочисленные несчастные случаи…»
Однако, ничтожное трение на
льду может быть успешно использовано технически. Уже обыкновенные сани служат
тому примером. Ещё лучше свидетельствуют об этом так называемые ледяные дороги,
которые устраивали для вывозки леса с места рубки к железной дороге или к
пунктам сплава. На такой дороге, имеющей гладкие ледяные рельсы, две лошади
тащат сани, нагруженные 70 тоннами брёвен.
Трение покоя, скольжения.
Прежде думали, что механизм трения не сложен:
поверхность покрыта неровностями и трение есть результат подъёма скользящих
частей на эти неровности; но это неправильно, ведь тогда не было бы потерь
энергии, а на самом деле энергия на трение тратится.
Механизм потерь иной. И здесь крайне неожиданным
оказывается, что эмпирически это трение можно приближенно описать простым
законом. Сила нужная для того, чтобы преодолевать трение и тащить один предмет
по поверхности другого, зависит от силы, направленной по нормали к поверхностям
соприкосновения.
Поверхность твёрдого тела обычно обладает
неровностями. Например, даже у очень хорошо отшлифованных металлов в
электронный микроскоп видны «горы» и «впадины» размером в 100-1000A. При сжатии тел соприкосновение происходит только в
самых высоких местах и площадь реального контакта значительно меньше общей
площади соприкасающихся поверхностей. Давление в местах соприкосновения может
быть очень большим, и там возникает пластическая деформация. При этом площадь
контакта увеличивается, а давление падает. Так продолжается до тех пор, пока давление не достигнет определённого значения, при котором
деформация прекращается. Поэтому площадь фактического контакта оказывается
пропорциональной сжимающей силе.
В месте контакта действуют силы молекулярного
сцепления (известно, например, что очень чистые и гладкие металлические
поверхности прилипают друг к другу).
Эта модель сил сухого трения (так называют трение
между твёрдыми телами), по-видимому, близка к реальной ситуации в металлах.
Если тело, например, просто лежит на горизонтальной
поверхности, то сила трения на него не действует. Трение возникает, если
попытаться сдвинуть тело, приложить к нему силу. Пока величина этой силы не
превышает определённого значения, тело остаётся в покое и сила трения равна по
величине и обратна по направлению приложенной силе. Затем начинается движение.
Может показаться удивительным, но именно сила трения
покоя разгоняет автомобиль. Ведь при движении автомобиля колеса не
проскальзывают относительно дороги, и между шинами и поверхностью дороги
возникает сила трения покоя (рис.4). Как легко видеть, она направлена в сторону
движения автомобиля. Величина этой силы не может превосходить максимального
значения трения покоя. Поэтому если на скользкой дороге резко нажать на газ, то
автомобиль начнет буксовать. А вот если нажать на тормоза, то вращение колёс
прекратится, и автомобиль будет скользить по дороге. Сила трения изменит своё
направление и начнёт тормозить автомобиль.
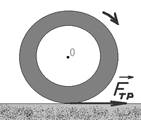
Рис.4
Сила трения при скольжении твёрдых тел зависит не
только от свойств поверхностей и силы давления (это зависимость качественно
такая же, как для трения покоя), но и от скорости движения. Часто с увеличением
скорости сила трения сначала резко падает, а затем снова начинает возрастать.
Эта важная особенность силы трения скольжения как раз
и объясняет, почему звучит скрипичная струна. Вначале между смычком и струной
нет проскальзывания, и струна захватывается смычком. Когда сила трения покоя
достигнет максимального значения, струна сорвется, и дальше она колеблется
почти как свободная, затем снова захватывается смычком и т.д.
Подобные, но уже вредные колебания могут возникнуть
при обработке металла на токарном станке вследствие трения между снимаемой стружкой
и резцом. И если смычок натирают канифолью, чтобы сделать зависимость силы
трения от скорости более резкой, то при обработке металла приходится
действовать наоборот (выбирать специальную форму резца, смазку и т.п.). Так что
важно знать законы трения и уметь ими пользоваться.
Кроме сухого трения существует ещё так называемое
жидкое трение, возникающее при движении твёрдых тел в жидкостях и газах и
связанное с их вязкостью. Силы жидкого трения пропорциональны скорости движения
и обращаются в нуль, когда тело останавливается. Поэтому в жидкости можно
заставить тело двигаться, прикладывая даже очень маленькую силу. Например,
тяжелую баржу на воде человек может привести в движение, отталкиваясь то дна
шестом, а на земле такой груз ему, конечно, не сдвинуть. Эта важная особенность
сил жидкого трения объясняет, например, тот факт, почему автомобиль «заносит»
на мокрой дороге. Трение становится жидким, и даже небольшие неровности дороги,
создающие боковые силы, приводят к «заносу» автомобиля.
Резюмируя вышесказанное
можно заключить, что возникновение трения обусловлено, прежде всего,
шероховатостью поверхностей, создающей сопротивление перемещению, и наличием
сцепления у прижатых друг к другу тел. Изучение всех особенностей явления
трения представляет собою довольно сложную физико-механическую проблему,
рассмотрение которой выходит за рамки курса теоретической механики.
В инженерных расчетах
обычно исходят из ряда установленных опытным путем общих закономерностей,
которые с достаточной для практики точностью отражают основные особенности
явления трения. Эти закономерности, называемые законами трения скольжения при
покое (законами Кулона), можно сформулировать следующим образом:
1. При стремлении сдвинуть
одно тело по поверхности другого в плоскости соприкосновения тел возникает сила
трения (или сила сцепления), величина которой может принимать любые
значения от нуля до значения Fпр, называемого предельной
силой трения.
![]()
Силой трения
скольжения ![]() (или просто силой трения) называется составляющая силы реакции связи, которая
лежит в касательной плоскости к поверхностям соприкасающихся тел (рис.5).
(или просто силой трения) называется составляющая силы реакции связи, которая
лежит в касательной плоскости к поверхностям соприкасающихся тел (рис.5).
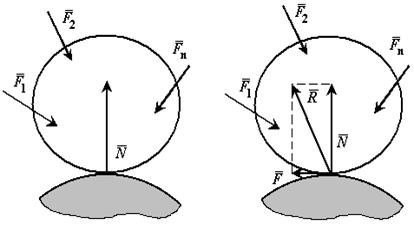
Рис.5
Сила трения направлена в
сторону, противоположную той, куда действующие силы стремятся сдвинуть тело.
В теоретической механике предполагается, что между
поверхностями соприкасающихся тел нет смазывающего вещества.
Сухим
трением называется трение, когда
между поверхностями соприкасающихся тел нет смазывающего вещества.
Будем рассматривать два случая: трения при покое или равновесии тела и трение
скольжения при движении одного тела по поверхности другого с некоторой
относительной скоростью.
При покое сила трения зависит только от активных сил.
При выбранном направлении касательной в точке соприкосновения поверхностей тел
сила трения вычисляется по формуле:
![]()
Аналогично при выбранном направлении нормали
нормальная реакция выражается через заданные силы:
![]()
При движении одного тела по поверхности другого сила
трения является постоянной величиной.
2. Величина предельной силы трения равна
произведению статического коэффициента трения на нормальное давление или
нормальную реакцию:
![]()
Статический коэффициент трения ![]() — число
отвлеченное 0<
— число
отвлеченное 0<![]() <1; он определяется опытным путем и зависит от
материала соприкасающихся тел и состояния поверхностей (характер обработки,
температура, влажность, смазка и т. п.). Считается, что коэффициент трения не
зависит от скорости движения.
<1; он определяется опытным путем и зависит от
материала соприкасающихся тел и состояния поверхностей (характер обработки,
температура, влажность, смазка и т. п.). Считается, что коэффициент трения не
зависит от скорости движения.
3. Предельная сила трения скольжения при прочих равных
условиях не зависит от площади соприкосновения трущихся поверхностей. Из этого
закона следует, что для того чтобы сдвинуть, например кирпич, надо приложить
одну и туже, силу, независимо, от того, какой гранью он положен на поверхность,
широкой или узкой.
Объединяя вместе первый и второй законы, получаем,
что при равновесии сила трения покоя (сила сцепления)
![]()
Реакции шероховатых связей. Угол
трения.
До сих пор при решении задач статики мы пренебрегали
трением и считали поверхности связей гладкими, а их реакции направленными по
нормалям к этим поверхностям. Реакция реальной (шероховатой) связи будет
слагаться из двух составляющих: из нормальной реакции ![]() и
перпендикулярной к ней силы трения
и
перпендикулярной к ней силы трения ![]() . Следовательно, полная реакция
. Следовательно, полная реакция ![]() будет
отклонена от нормали к поверхности на некоторый угол. При изменении силы
трения от нуля до Fпр сила R будет меняться от N до Rпр, а ее угол с нормалью будет
расти от нуля до некоторого предельного значения
будет
отклонена от нормали к поверхности на некоторый угол. При изменении силы
трения от нуля до Fпр сила R будет меняться от N до Rпр, а ее угол с нормалью будет
расти от нуля до некоторого предельного значения ![]() (рис. 6).
(рис. 6).
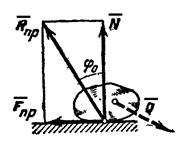
Рис.6
Наибольший угол ![]() , который полная реакция шероховатой связи образует
с нормалью к поверхности, называется углом
трения. Из рис.6 видно, что
, который полная реакция шероховатой связи образует
с нормалью к поверхности, называется углом
трения. Из рис.6 видно, что
![]() .
.
Так как ![]() , отсюда находим следующую связь между углом трения
и коэффициентом трения:
, отсюда находим следующую связь между углом трения
и коэффициентом трения:
![]()
При равновесии полная реакция R, в зависимости
от сдвигающих сил, может проходить где угодно внутри угла трения. Когда равновесие
становится предельным, реакция будет отклонена от нормали на угол ![]() .
.
Конусом
трения называют конус, описанный
предельной силой реакции шероховатой связи ![]() вокруг
направления нормальной реакции.
вокруг
направления нормальной реакции.
Если к телу, лежащему на
шероховатой поверхности, приложить силу Р,
образующую угол α с нормалью (рис. 7), то тело сдвинется только
тогда, когда сдвигающее усилие Psin![]() будет больше
будет больше ![]() (мы считаем N=Pcos𝛼, пренебрегая весом тела).
Но неравенство
(мы считаем N=Pcos𝛼, пренебрегая весом тела).
Но неравенство ![]() , в котором
, в котором ![]() , выполняется только при
, выполняется только при ![]() , т.е. при
, т.е. при ![]() . Следовательно, никакой
силой, образующей с нормалью угол
. Следовательно, никакой
силой, образующей с нормалью угол ![]() , меньший угла трения
, меньший угла трения ![]() , тело вдоль данной
поверхности сдвинуть нельзя. Этим объясняются известные явления заклинивания
или самоторможения тел.
, тело вдоль данной
поверхности сдвинуть нельзя. Этим объясняются известные явления заклинивания
или самоторможения тел.
Рис.7
Для равновесия твёрдого тела на шероховатой
поверхности необходимо и достаточно, чтобы линия действия равнодействующей
активных сил, действующих на твёрдое тело, проходила внутри конуса трения или
по его образующей через его вершину.
Тело нельзя вывести из равновесия любой по модулю
активной силой, если её линия действия проходит внутри конуса трения.
Равновесие
при наличии трения.
Изучение равновесия тел с
учетом трения сводится обычно к рассмотрению предельного положения равновесия,
когда сила трения достигает своего наибольшего значения Fпр. При аналитическом решении
задач реакцию шероховатой связи в этом случае изображают двумя составляющими N
и Fпр, где ![]() . Затем составляют обычные условия равновесия
статики, подставляют в них вместо Fпр величину
. Затем составляют обычные условия равновесия
статики, подставляют в них вместо Fпр величину ![]() и, решая полученные уравнения, определяют
искомые величины.
и, решая полученные уравнения, определяют
искомые величины.
Пример 1. Рассмотрим тело, имеющее вертикальную плоскость
симметрии (рис.8). Сечение тела этой плоскости имеет форму прямоугольника.
Ширина тела равна 2a.
К телу в точке С, лежащей на оси симметрии, приложена вертикальная сила ![]() и в точке А, лежащей на расстоянии h от основания, горизонтальная сила
и в точке А, лежащей на расстоянии h от основания, горизонтальная сила ![]() . Реакция плоскости основания (реакция связи)
приводится к нормальной реакции
. Реакция плоскости основания (реакция связи)
приводится к нормальной реакции ![]() и силе трения
и силе трения ![]() . Линия
действия силы
. Линия
действия силы ![]() неизвестна.
Расстояние от точки С
до линии действия силы
неизвестна.
Расстояние от точки С
до линии действия силы ![]() обозначим x (
обозначим x (![]() ).
).
Рис.8
Решение. Составим три уравнения равновесия:
![]()
![]()
![]()
Согласно
закону Кулона ![]() , т.е.
, т.е. ![]() . (1)
. (1)
Так
как ![]() , то
, то ![]() (2)
(2)
Проанализируем полученные результаты:
Будем увеличивать силу ![]() .
.
Если f<a/h, то
равновесие будет иметь место до тех пор, пока сила трения не достигнет своей
предельной величины, условие (1) превратится в равенство. Дальнейшее увеличение
силы приведет к скольжению тела по поверхности.
Если f>a/h, то
равновесие будет иметь место до тех пор, пока сила трения не достигнет величины
![]() /h, условие (2) превратится в равенство. Величина
x будет равна h. Дальнейшее увеличение
силы приведет к тому, что тело станет опрокидываться вокруг точки B (скольжения не будет).
/h, условие (2) превратится в равенство. Величина
x будет равна h. Дальнейшее увеличение
силы приведет к тому, что тело станет опрокидываться вокруг точки B (скольжения не будет).
Пример 2. На какое максимальное расстояние
а может подняться человек по лестнице, приставленной к стене (рис.9)?
Если вес человека – Р,
коэффициент трения скольжения между лестницей и стеной – ![]() , между лестницей и полом –
, между лестницей и полом – ![]() .
.
Рис.9
Решение. Рассматриваем равновесие лестницы с человеком.
Показываем силу ![]() , нормальные реакции
, нормальные реакции ![]() и
и ![]() и добавляем силы трения:
и добавляем силы трения: ![]() и
и ![]() . Полагаем, что человек находится на расстоянии
. Полагаем, что человек находится на расстоянии ![]() , при большем значении которого начнётся движение
лестницы. Составляем уравнения равновесия.
, при большем значении которого начнётся движение
лестницы. Составляем уравнения равновесия.
![]()
![]()
![]()
Подставив значения сил трения и решив систему
уравнений, получим
![]()
Теперь можно определить и угол
под которым надо поставить лестницу, чтоб добраться до стены. Полагая a=l, получим, после преобразований, ![]() и
и ![]() .
.
Рис.10
Заметим, что если равнодействующая ![]() всех активных
сил (всех кроме реакций) направлена под углом
всех активных
сил (всех кроме реакций) направлена под углом ![]() (рис.10), то
нормальная реакция
(рис.10), то
нормальная реакция ![]() , а сила трения
, а сила трения ![]() Для того, чтобы
началось скольжение должно выполнятся условие
Для того, чтобы
началось скольжение должно выполнятся условие ![]() . или
. или ![]() . И так как
. И так как ![]() , то
, то ![]() . Значит угол
. Значит угол ![]() должен быть
больше угла
должен быть
больше угла ![]() . Следовательно, если сила
. Следовательно, если сила ![]() действует
внутри угла или конуса трения (
действует
внутри угла или конуса трения (![]() ), то как бы не была велика эта сила, скольжение тела
не произойдёт. Такое условие называется условием заклинивания, самоторможения.
), то как бы не была велика эта сила, скольжение тела
не произойдёт. Такое условие называется условием заклинивания, самоторможения.
Мы рассмотрели скольжение твёрдых тел по поверхности.
Но нередко встречается скольжение гибких тел по неплоской поверхности.
Например, нежелательное проскальзывание в ременной передаче ремня по шкиву, или
троса, каната, намотанного на неподвижный цилиндр.
Пример 3. Пусть имеется нить, перекинутая через неподвижную цилиндрическую
поверхность (рис.11). За счёт сил трения натяжение левого и правого концов
этой нити будут различными.
Рис.11 Рис.12
Решение. Предположим, что нормальная реакция и сила трения
распределяются равномерно по дуге контакта нити на цилиндре. Рассмотрим
равновесие участка нити длиной ![]() . (рис.12). На левом конце этого участка натяжение
. (рис.12). На левом конце этого участка натяжение ![]() , на правом
, на правом ![]() . Составляем уравнения равновесия, проектируя силы на
оси:
. Составляем уравнения равновесия, проектируя силы на
оси:
![]()
![]()
Так как угол ![]() - малая
величина, то полагаем
- малая
величина, то полагаем ![]() С учётом этого
из уравнений находим
С учётом этого
из уравнений находим ![]() и, так как
и, так как ![]() , имеем
, имеем ![]() или
или ![]() . Интегрируя,
получим
. Интегрируя,
получим ![]() . Или
. Или
![]()
Этот результат называется формулой Эйлера.
Например, если нить перекинута через неподвижный шкив
и ![]() , а коэффициент трения f=0,2, то отношение натяжений
, а коэффициент трения f=0,2, то отношение натяжений ![]() . А, обернув цилиндр один раз (
. А, обернув цилиндр один раз (![]() ),
), ![]() то есть можно удержать груз на другом конце нити силой
почти в три раза меньшей веса тела.
то есть можно удержать груз на другом конце нити силой
почти в три раза меньшей веса тела.
Пример
4. Однородный брус опирается в точке А
на негладкий горизонтальный пол и удерживается в точке в веревкой. Коэффициент трения
бруса о пол равен f. При каком угле φ
наклона веревки к горизонту брус начнет скользить по полу? Угол α, образуемый брусом и полом, равен 45°.
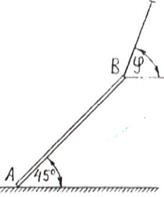
Рис.13
Решение. Освободим брус от связей и приложим к нему реакции
связей. На рис. 14 ![]() -
реакция веревки в точке В. NA— реакция пола;
FA -
сила трения бруса о пол. Учитывая,
что сила трения бруса о пол связана с реакцией пола соотношением FA = NAf, составим уравнения равновесия бруса.
-
реакция веревки в точке В. NA— реакция пола;
FA -
сила трения бруса о пол. Учитывая,
что сила трения бруса о пол связана с реакцией пола соотношением FA = NAf, составим уравнения равновесия бруса.
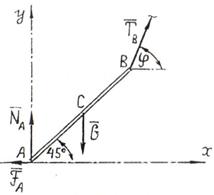
Рис.14
Условия равновесия бруса
имеют вид:
![]()
![]()
![]()
где l - длина
стержня АВ.
После подстановки в первое уравнение
соотношения FA = NAf и преобразований получаем:
![]()
![]()
![]()
![]()
Далее имеем
![]()
![]()
Откуда
![]()
Трение
качения и верчения.
Возьмем деревянный цилиндр и положим его на стол так,
чтобы он касался стола по образующей. В центры оснований цилиндра вставим концы
проволочной вилки и прикрепим к ней снабженный очень чувствительный динамометр.
Если тянуть за динамометр, то цилиндр покатится по столу. По показаниям
динамометра увидим, что нужна весьма небольшая сила тяги, чтобы сдвинуть с
места цилиндр и катить его равномерно дальше, гораздо меньшая, чем при
скольжении того же цилиндра, если бы он не вращался и скользил бы по столу. При
той же силе давления на стол сила трения качения много меньше силы трения
скольжения. Например, при качении стальных колёс по стальным рельсам трение
качения примерно в 100 раз меньше, чем трение скольжения. Поэтому в машинах
стремятся заменить трение скольжения трением качения,
применяя так называемые шариковые или роликовые подшипники.
Происхождение трения качения можно наглядно
представить себе так. Когда шар или цилиндр катится по поверхности другого
тела, он немного вдавливается в поверхность этого тела, а сам немного сжимается
(рис.15). Таким образом, катящееся тело всё время как бы вкатывается на горку.

Рис.15
Вместе с тем происходит отрыв участков одной
поверхности от другой, а силы сцепления, действующие между этими поверхностями,
препятствуют этому. Оба эти явления и вызывают силы трения качения. Чем твёрже
поверхности, тем меньше вдавливание и тем меньше трение качения.
Трением качения называется сопротивление,
возникающее при качении одного тела по поверхности другого.
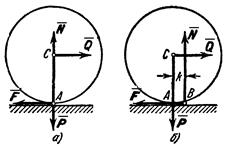
Рис.16
Рассмотрим круглый
цилиндрический каток радиуса R и веса ![]() , лежащий на горизонтальной
шероховатой плоскости. Приложим к оси катка силу
, лежащий на горизонтальной
шероховатой плоскости. Приложим к оси катка силу ![]() (рис. 16,а), меньшую Fпр. Тогда в точке А возникает сила трения
(рис. 16,а), меньшую Fпр. Тогда в точке А возникает сила трения ![]() , численно равная Q,
которая будет препятствовать скольжению цилиндра по плоскости. Если считать
нормальную реакцию
, численно равная Q,
которая будет препятствовать скольжению цилиндра по плоскости. Если считать
нормальную реакцию ![]() тоже приложенной в точке А,
то она уравновесит силу
тоже приложенной в точке А,
то она уравновесит силу ![]() , а силы
, а силы ![]() и
и ![]() образуют пару, вызывающую качение цилиндра. При
такой схеме качение должно начаться, как видим, под действием любой, сколь
угодно малой силы
образуют пару, вызывающую качение цилиндра. При
такой схеме качение должно начаться, как видим, под действием любой, сколь
угодно малой силы ![]() . Истинная
же картина, как показывает опыт, выглядит иначе. Объясняется это тем, что
фактически, вследствие деформаций тел, касание их происходит вдоль некоторой
площадки АВ (рис. 16, б). При действии силы
. Истинная
же картина, как показывает опыт, выглядит иначе. Объясняется это тем, что
фактически, вследствие деформаций тел, касание их происходит вдоль некоторой
площадки АВ (рис. 16, б). При действии силы ![]() интенсивность давлений у края А убывает, а у края В возрастает. В
результате реакция
интенсивность давлений у края А убывает, а у края В возрастает. В
результате реакция ![]() оказывается смещенной в сторону действия силы
оказывается смещенной в сторону действия силы ![]() . С увеличением
. С увеличением ![]() это смещение растет до некоторой предельной
величины k.
Таким образом, в предельном положении на каток будут действовать пара (
это смещение растет до некоторой предельной
величины k.
Таким образом, в предельном положении на каток будут действовать пара (![]() ,
, ![]() ) с моментом
) с моментом ![]() и уравновешивающая ее пара (
и уравновешивающая ее пара (![]() ) с моментом Nk. Из равенства моментов находим
) с моментом Nk. Из равенства моментов находим ![]() или
или
![]()
Пока ![]() , каток находится в покое; при
, каток находится в покое; при ![]() начинается
качение.
начинается
качение.
Входящая в формулу линейная
величина k называется коэффициентом
трения качения. Измеряют величину k обычно в сантиметрах.
Значение коэффициента k зависит от материала тел и определяется опытным
путем.
Коэффициент трения качения при качении в первом
приближении можно считать не зависящим от угловой скорости качения катка и его
скорости скольжения по плоскости.
Для вагонного колеса по рельсу k=0,5 мм.
Рассмотрим движение ведомого колеса. ![]()
Качение колеса начнется, когда выполнится условие QR>M или Q>Mmax/R=kN/R
Скольжение колеса начнется, когда выполнится
условие Q>Fmax=fN.
Обычно отношение
![]() и качение
начинается раньше скольжения.
и качение
начинается раньше скольжения.
Если ![]() , то колесо будет скользить по поверхности, без
качения.
, то колесо будет скользить по поверхности, без
качения.
Отношение ![]() для
большинства материалов значительно меньше статического коэффициента трения
для
большинства материалов значительно меньше статического коэффициента трения ![]() . Этим объясняется то, что в технике, когда это возможно, стремятся заменить скольжение качением
(колеса, катки, шариковые подшипники и т. п.).
. Этим объясняется то, что в технике, когда это возможно, стремятся заменить скольжение качением
(колеса, катки, шариковые подшипники и т. п.).
Сопротивление
среды.
Если твёрдое тело находится внутри жидкости или газа,
то вся его поверхность всё время соприкасается с частицами жидкости или газа.
При движении тела на него со стороны жидкости или газа действуют силы, направленные
навстречу движению. Эти силы называют сопротивлением среды. Как силы трения,
сопротивление среды всегда направленно против движения. Сопротивление среды
можно рассматривать как один из видов трения.
Особенностью сил трения в жидкости или газе является
отсутствие трения покоя. Твёрдое тело лежащее на
другом твёрдом теле, может быть сдвинуто с места, только если к нему приложена
достаточно большая сила, превосходящая наибольшую силу трения покоя. При
меньшей силе твёрдое тело с места не сдвинется, сколько бы времени эта сила ни
действовала. Картина получается иной, если тело находится в жидкости. В этом
случае, чтобы сдвинуть с места тело, достаточно сколь угодно малых сил: хотя и
очень медленно, но всё же тело начнёт двигаться. Человек вообще никогда не
сдвинет с места голыми руками камень весом в сто тонн. В то же время баржу
весом в сто тонн, плавающую на воде, один человек, хотя и очень медленно, но
всё же сможет двигать. Однако по мере увеличения скорости сопротивление среды
сильно увеличивается, так что, сколько бы времени сила не действовала, она не
сможет разогнать тело до большой скорости.
Важной характеристикой жидких и газообразных сред
является вязкость. Вязкость – свойство текучих тел (жидкостей и газов)
сопротивляться перемещению одной их части относительно другой под действием
внешних сил.
Количественно вязкость определяется величиной
касательной силы, которая должна быть приложена к единице площади сдвигаемого
слоя, чтобы поддерживать в этом слое ламинарное течение с постоянной скоростью
относительно сдвига, равной единице.
Вязкость газов и жидкостей, согласно молекулярной
кинетической теории, вызвана передачей импульса от молекул более быстро
движущегося слоя к молекулам более медленного слоя, которая происходит при
перемешивании молекул соседних слоёв вследствие теплового движения.
Силы внутреннего трения гораздо меньше сил трения
скольжения. Поэтому для уменьшения трения между движущимися частями машин и
механизмов используется смазка – слой вязкой жидкости, заполняющий пространство
между трущимися поверхностями и оттесняющий их друг от друга. Это приводит к
существенному уменьшению нагрева и износа деталей. Вместе с тем следует
избегать попадания жидкости между фрикционными муфтами, ремнём и шкивом в
ременной передаче, ведущими колесами локомотива и рельсом и т.п., ибо во всех
этих случаях именно сила трения служит для передачи движения.
С увеличением температуры вязкость газов возрастает, а
жидкостей (за некоторым исключением) резко падает. Это связано с различиями в
характере движения молекул в жидкости и газе. При понижении температуры
вязкость некоторых жидкостей настолько возрастает, что они теряют характерную
для них способность течь, превращаясь в аморфные твёрдые тела.
Сопротивление
воздуха.
При движении твёрдого тела в воздухе на тело действует
сила сопротивления воздуха, направленная противоположно движению тела. Такая же
сила возникает, если на неподвижное тело набегает пучок воздуха; она
направлена, конечно, по движению потока.
Сила сопротивления вызывается, во-первых, трением
воздуха о поверхность тела и, во-вторых, изменением движения потока, вызванным
телом. В воздушном потоке, изменённом присутствием тела, давление на передней
стороне тела растёт, а на задней – понижается по сравнению с давлением в
невозмущенном потоке.
Таким образом, создаётся разность давлений, тормозящая
движущееся тело или увлекающая тело, погруженное в поток. Движение воздуха
позади тела принимает беспорядочный вихревой характер.
Сила сопротивления зависит от скорости потока, от
размеров и формы тела.
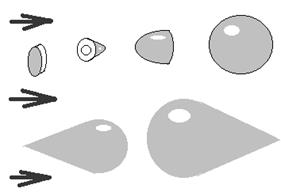
Рис.17
Для всех тел, изображенных на рис.17, сопротивление
движению одинаково, несмотря на весьма разные размеры тел.
«Обтекаемое» тело почти не нарушает правильности
потока; поэтому давление на заднюю часть тела лишь немного понижено по
сравнению с передней частью и сопротивление не велико.
Различные обтекатели, устанавливаемые на выдающихся
частях самолёта, как раз имеют своим назначением устранять завихрения потока
выступающими частями конструкции. Вообще же конструкторы стремятся оставлять на
поверхности возможно меньшее количество выдающихся частей и неровностей,
могущих создавать завихрения.
Влияние сопротивления воздуха сильно сказывается и для
наземных средств передвижения: с увеличением скорости автомобилей на
преодоление сопротивления воздуха затрачивается всё большая часть мощности
мотора. Поэтому современным автомобилям также придают по возможности обтекаемую
форму.
Для уменьшения трения при сверхзвуковой скорости нужно
заострять переднюю часть движущегося тела, в то время как при меньших скоростях
наибольшее значение имеет «обтекаемость».
Сопротивление
воды.
При движении тел в воде также возникаю силы сопротивления,
направленные противоположно движению тела. Если тело движется под водой, то
сопротивление теми же обстоятельствами, что и при движении в воздухе: трение
воды о поверхность тела и изменением потока, создающим дополнительное
сопротивление. Быстро плавающие рыбы и китообразные имеют «обтекаемую форму
тела, уменьшающую сопротивление воды при их движении. Обтекаемую форму придают
и подводным лодкам. Вследствие большой
плотности воды по сравнению с плотностью воздуха, сопротивление движению
данного тела в воде много больше сопротивления в воздухе при той же скорости
движения.
Для обычных судов, идущих на поверхности воды, есть
ещё дополнительное волновое сопротивление: от идущего судна на поверхности воды
расходятся волны, на создание которых непроизводительно затрачивается часть
работы судовой машины.
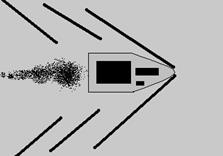
Рис.18
Для уменьшения волнового сопротивления, которое для
быстроходных судов может составлять 3/4 полного сопротивления, корпусу судна
придают специальную форму. Нос судна в подводной части иногда делают «бульбообразной» формы (рис.18); при этом образование волн
на поверхности воды уменьшается, а значит, уменьшается и сопротивление.
Момент силы относительно центра как
вектор.
Чтобы перейти к решению задач статики для системы
сил, как угодно расположенных в пространстве, оказывается необходимым несколько
уточнить и расширить ряд введенных ранее понятий. Начнем с понятия о моменте
силы.
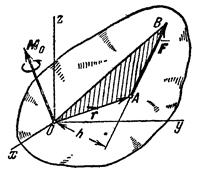
Рис.19
1. Изображение момента вектором. Момент силы ![]() относительно центра О
(см. рис. 19) как характеристика ее вращательного эффекта определяется следующими
тремя элементами:
относительно центра О
(см. рис. 19) как характеристика ее вращательного эффекта определяется следующими
тремя элементами:
1) модулем момента, равным произведению модуля
силы на плечо, т. е. Fh; 2) плоскостью поворота ОАВ, проходящей через линию действия
силы ![]() и центр О; 3) направлением поворота в
этой плоскости. Когда все силы и центр О
лежат в одной плоскости,
необходимость задавать каждый раз плоскость поворота
ОАВ отпадает, и момент можно
определять как скалярную алгебраическую величину, равную
и центр О; 3) направлением поворота в
этой плоскости. Когда все силы и центр О
лежат в одной плоскости,
необходимость задавать каждый раз плоскость поворота
ОАВ отпадает, и момент можно
определять как скалярную алгебраическую величину, равную ![]() , где знак указывает направление
поворота.
, где знак указывает направление
поворота.
Но в случае сил, произвольно расположенных в
пространстве, плоскости поворота у разных сил будут разными и должны задаваться
дополнительно. Положение плоскости в пространстве можно задать, задав отрезок
(вектор), перпендикулярный к этой плоскости. Если одновременно модуль этого
вектора выбрать равным модулю момента силы и условиться
направлять этот вектор так, чтобы его направление определяло направление
поворота силы, то такой вектор полностью определит все три элемента,
характеризующие момент данной силы относительно центра О.
Поэтому в общем случае момент ![]() силы
силы ![]() относительно центра О (рис. 19) будем
изображать приложенным в центре О вектором
относительно центра О (рис. 19) будем
изображать приложенным в центре О вектором ![]() , равным по модулю (в выбранном
масштабе) произведению модуля силы
, равным по модулю (в выбранном
масштабе) произведению модуля силы ![]() на плечо h и перпендикулярным к плоскости ОАВ, проходящей через центр О и силу
на плечо h и перпендикулярным к плоскости ОАВ, проходящей через центр О и силу ![]() . Направлять вектор
. Направлять вектор ![]() будем в ту сторону, откуда поворот,
совершаемый силой, виден происходящим против хода часовой стрелки. Таким
образом, вектор
будем в ту сторону, откуда поворот,
совершаемый силой, виден происходящим против хода часовой стрелки. Таким
образом, вектор ![]() будет одновременно характеризовать модуль
момента, плоскость поворота ОАВ, разную для разных сил, и направление поворота в
этой плоскости. Точка приложения вектора
будет одновременно характеризовать модуль
момента, плоскость поворота ОАВ, разную для разных сил, и направление поворота в
этой плоскости. Точка приложения вектора ![]() определяет положение центра момента.
определяет положение центра момента.
2. Выражение момента силы с
помощью векторного произведения. Рассмотрим векторное произведение ![]() векторов
векторов ![]() (рис. 19). По определению,
(рис. 19). По определению, ![]() , так как
модуль вектора
, так как
модуль вектора ![]() тоже равен 2 пл.
тоже равен 2 пл. ![]() .
Направлен вектор (
.
Направлен вектор (![]() )
перпендикулярно к плоскости ОАВ, в ту сторону, откуда кратчайшее
совмещение
)
перпендикулярно к плоскости ОАВ, в ту сторону, откуда кратчайшее
совмещение ![]() (если их отложить от одной точки) видно против
хода часовой стрелки, т. е., так же, как вектор
(если их отложить от одной точки) видно против
хода часовой стрелки, т. е., так же, как вектор ![]() .
Следовательно, векторы (
.
Следовательно, векторы (![]() ) и
) и ![]() совпадают и по модулю и по направлению и, как легко проверить, по
размерности, т. е. оба эти вектора изображают одну и ту же величину. Отсюда
совпадают и по модулю и по направлению и, как легко проверить, по
размерности, т. е. оба эти вектора изображают одну и ту же величину. Отсюда
![]() или
или ![]() ,
,
где вектор ![]() называется радиусом-вектором точки А относительно центра О.
называется радиусом-вектором точки А относительно центра О.
Таким образом, момент силы ![]() относительно центра О
равен векторному произведению радиуса вектора
относительно центра О
равен векторному произведению радиуса вектора
![]() , соединяющего центр О
с точкой приложения силы А, на саму силу. Этим выражением момента силы
бывает удобно пользоваться при доказательстве некоторых теорем.
, соединяющего центр О
с точкой приложения силы А, на саму силу. Этим выражением момента силы
бывает удобно пользоваться при доказательстве некоторых теорем.
Момент
пары сил как вектор.
Действие пары сил на тело
характеризуется: 1) величиной модуля момента пары, 2) плоскостью действия, 3)
направлением поворота в этой плоскости. При рассмотрении пар, не лежащих в
одной плоскости, для характеристики каждой из пар необходимо будет задать все
эти три элемента. Это можно сделать, если условиться, по
аналогии с моментом силы, изображать момент пары соответствующим образом,
построенным вектором, а именно: будем изображать момент пары вектором т или М,
модуль которого равен (в выбранном масштабе) модулю момента пары, т.е.
произведению одной из ее сил на плечо, и который направлен перпендикулярно
плоскости действия пары в ту сторону, откуда поворот пары виден происходящим
против хода часовой стрелки (рис. 20).
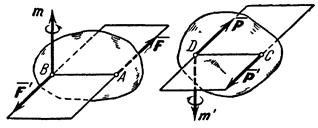
Рис. 20
Как известно модуль момента
пары равен моменту одной из ее сил относительно точки, где приложена другая
сила, т. е. ![]() ; по направлению же векторы
этих моментов совпадают. Следовательно
; по направлению же векторы
этих моментов совпадают. Следовательно ![]() .
.
Момент
силы относительно оси.
Чтобы перейти к решению
задач статики для случая произвольной пространственной системы сил, необходимо
ввести еще понятие о моменте силы относительно оси.
Момент силы относительно
оси характеризует вращательный эффект, создаваемый силой, стремящейся повернуть
тело вокруг данной оси. Рассмотрим твердое тело, которое может вращаться
вокруг некоторой оси z
(рис. 21).
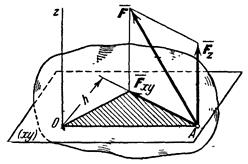
Рис.21
Пусть на это тело действует
сила ![]() , приложенная
в точке А. Проведем через точку А плоскость ху,
перпендикулярную оси z, и разложим силу
, приложенная
в точке А. Проведем через точку А плоскость ху,
перпендикулярную оси z, и разложим силу ![]() на составляющие:
на составляющие: ![]() , параллельную оси z, и
, параллельную оси z, и ![]() , лежащую в плоскости ху (
, лежащую в плоскости ху (![]() является одновременно проекцией силы
является одновременно проекцией силы ![]() на плоскости ху).
Сила
на плоскости ху).
Сила ![]() , направленная параллельно
оси z, очевидно, не может повернуть тело вокруг этой оси (она только
стремится сдвинуть тело вдоль оси z). Весь вращательный эффект,
создаваемый силой
, направленная параллельно
оси z, очевидно, не может повернуть тело вокруг этой оси (она только
стремится сдвинуть тело вдоль оси z). Весь вращательный эффект,
создаваемый силой ![]() , будет совпадать с
вращательным эффектом ее составляющей
, будет совпадать с
вращательным эффектом ее составляющей ![]() . Отсюда заключаем, что
. Отсюда заключаем, что ![]() , где символ
, где символ ![]() обозначает момент силы
обозначает момент силы ![]() относительно оси z.
относительно оси z.
Для силы же ![]() , лежащей в плоскости, перпендикулярной к оси z, вращательный эффект измеряется
произведением модуля этой силы на ее расстояние h от оси. Но этой же величиной измеряется момент силы
, лежащей в плоскости, перпендикулярной к оси z, вращательный эффект измеряется
произведением модуля этой силы на ее расстояние h от оси. Но этой же величиной измеряется момент силы ![]() относительно
точки О, в
которой ось z пересекается с плоскостью xу. Следовательно,
относительно
точки О, в
которой ось z пересекается с плоскостью xу. Следовательно, ![]() или, согласно
предыдущему равенству,
или, согласно
предыдущему равенству, ![]()
В результате приходим к следующему определению:
моментом силы относительно оси называется скалярная величина, равная моменту
проекции этой силы на плоскость, перпендикулярную оси, взятому относительно
точки пересечения оси с плоскостью.
Рис.22
Момент будем считать
положительным, если с положительного конца оси z поворот, который сила ![]() , стремится совершить,
виден происходящим против хода часовой стрелки, и отрицательным, если по ходу
часовой стрелки.
, стремится совершить,
виден происходящим против хода часовой стрелки, и отрицательным, если по ходу
часовой стрелки.
Из чертежа (рис.22) видно, что при вычислении момента
плоскость ху можно проводить через любую точку
оcи z. Таким образом, чтобы найти момент силы относительно оси z
(рис. 22) надо:
1) провести плоскость ху, перпендикулярную к оси z (в любом месте);
2) спроектировать силу ![]() на эту плоскость и вычислить величину
на эту плоскость и вычислить величину ![]() ;
;
3) опустить из точки О пересечения оси с плоскостью перпендикуляр на
направление ![]() и найти его длину h;
и найти его длину h;
4) вычислить произведение ![]() ;
;
5) определить знак момента.
При вычислении моментов
надо иметь в виду следующие частные случаи:
1) Если сила параллельна
оси, то ее момент относительно оси равен нулю (так как Fxy=0).
2) Если линия действия силы пересекает ось, то ее
момент относительно оси также равен нулю (так как h = 0).
Объединяя оба случая вместе, заключаем, что момент
силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
3) Если сила перпендикулярна к оси, то ее момент
относительно оси равен произведению модуля силы на расстояние между силой и
осью.
Рис. 3.4.
Пример 5. Определим моменты
сил
![]() и
и ![]() относительно
осей (рис.23).
относительно
осей (рис.23).
Рис.23
Решение. Моменты силы ![]() находятся
просто:
находятся
просто:
Mx(![]() )=
)=![]() ;
;
My(![]() )=0;
)=0;
Mz(![]() )=
)=![]() .
.
Моменты сил ![]() и
и ![]() - посложнее.
- посложнее.
В тех случаях, когда вектор силы направлен под углом
к осям, полезно разложить вектор силы на составляющие параллельные осям и,
затем, находить сумму моментов этих составляющих.
Так моменты силы ![]() :
:
![]() ;
;
![]() ;
;![]()
![]() .
.
И силы ![]() :
:
![]() ;
;
![]() ;
;
![]() (линия действия
силы
(линия действия
силы ![]() пересекает ось z).
пересекает ось z).
Зависимость
между моментами силы относительно центра и относительно оси.
Пусть на тело действует
приложенная в точке А сила ![]() (рис. 24). Проведем какую-нибудь ось z и
возьмем на ней произвольную точку О. Момент силы
(рис. 24). Проведем какую-нибудь ось z и
возьмем на ней произвольную точку О. Момент силы ![]() относительно центра О
будет изображаться вектором
относительно центра О
будет изображаться вектором ![]() перпендикулярным плоскости ОАВ, причем
по модулю
перпендикулярным плоскости ОАВ, причем
по модулю ![]() .
.
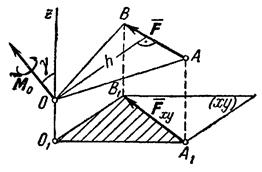
Рис.24
Проведем теперь через любую точку O1 на оси z
плоскость ху,
перпендикулярную к оси; проектируя силу ![]() на эту
плоскость, найдем
на эту
плоскость, найдем ![]() .
.
Но треугольник О1А1В1 представляет собою проекцию треугольника ОАВ на плоскость ху. Угол между плоскостями этих
треугольников равен углу между перпендикулярами к плоскостям, т.
е. равен ![]() . Тогда, по известной геометрической формуле,
. Тогда, по известной геометрической формуле, ![]() .
.
Умножая обе части этого равенства на 2 и замечая, что
удвоенные пощади треугольников О1А1В1 и ОАВ равны соответственно ![]() и
и
![]() , найдем окончательно:
, найдем окончательно: ![]() .
.
Так как произведение ![]() дает проекцию вектора
дает проекцию вектора ![]() на ось z, то равенство можно еще
представить в виде
на ось z, то равенство можно еще
представить в виде
![]() или
или ![]() .
.
В результате мы доказали, что между моментом силы
относительно оси и ее моментом относительно какого-нибудь центра, лежащего на
этой оси, существует следующая зависимость: момент силы ![]() относительно
оси равен проекции на эту ось вектора, изображающего момент данной силы
относительно любого центра, лежащего на оси.
относительно
оси равен проекции на эту ось вектора, изображающего момент данной силы
относительно любого центра, лежащего на оси.
Приведение пространственной системы
сил к данному центру.
Полученные выше результаты позволяют решить задачу
о приведении любой системы сил к данному центру. Эта задача, решается с помощью
теоремы о параллельном переносе силы. Для переноса действующей на абсолютно
твердое тело силы ![]() из точки А (рис. 25,а) в точку О прикладываем в точке О силы
из точки А (рис. 25,а) в точку О прикладываем в точке О силы ![]() и
и ![]() . Тогда сила
. Тогда сила
![]() окажется
приложенной в точке О
и к ней будет присоединена
пара (
окажется
приложенной в точке О
и к ней будет присоединена
пара (![]() ) с моментом
) с моментом
![]() , что можно показать еще так, как на рис. 25,б. При этом
, что можно показать еще так, как на рис. 25,б. При этом ![]() .
.
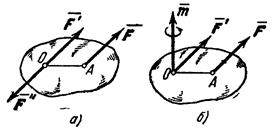
Рис.25
Рассмотрим теперь твердое тело, на которое
действует какая угодно система сил ![]() ,
, ![]() ,…,
,…,![]() (рис. 26,а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в
этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет
действовать система сил
(рис. 26,а). Выберем произвольную точку О за центр приведения и перенесем все силы системы в
этот центр, присоединяя при этом соответствующие пары. Тогда на тело будет
действовать система сил
![]() .
.
приложенных
в центре О, и система пар, моменты которых будут равны
![]() ,
,
Силы, приложенные в точке О,
заменяются одной силой ![]() , приложенной в той же точке. При этом
, приложенной в той же точке. При этом ![]() или,
или,
![]() .
.
Чтобы сложить все полученные пары, надо
геометрически сложить векторы моментов этих пар. В результате система пар заменится
одной парой, момент которой ![]() или,
или,
![]() .
.
Как и в случае плоской системы,
величина ![]() , равная геометрической сумме
всех сил, называется главным
вектором системы; величина
, равная геометрической сумме
всех сил, называется главным
вектором системы; величина ![]() , равная геометрической сумме моментов
всех сил относительно центра О, называется главным моментом системы относительно этого центра.
, равная геометрической сумме моментов
всех сил относительно центра О, называется главным моментом системы относительно этого центра.
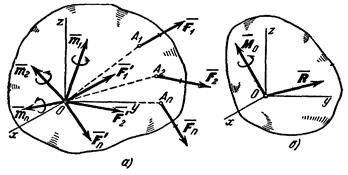
Рис.26
Таким образом мы доказали
следующую теорему, любая система сил, действующих на абсолютно твердое тело,
при приведении к произвольно взятому центру О
заменяется одной силой ![]() , равной главному вектору системы
и приложенной в центре приведения О, и одной парой с моментом
, равной главному вектору системы
и приложенной в центре приведения О, и одной парой с моментом ![]() , равным главному моменту системы
относительно центра О (рис. 26, б).
, равным главному моменту системы
относительно центра О (рис. 26, б).
Векторы ![]() и
и ![]() обычно определяют аналитически, т.е. по их
проекциям на оси координат.
обычно определяют аналитически, т.е. по их
проекциям на оси координат.
Выражения для Rx,
Ry,
Rz нам известны. Проекции вектора
![]() на оси координат будем обозначать Mx, My,
Mz. По теореме о проекциях
суммы векторов на ось будет
на оси координат будем обозначать Mx, My,
Mz. По теореме о проекциях
суммы векторов на ось будет ![]() или,
или, ![]() . Аналогично находятся
величины My и Mz.
. Аналогично находятся
величины My и Mz.
Окончательно для
определения проекций главного вектора ![]() и главного момента
и главного момента ![]() получаем формулы:
получаем формулы:
![]()
![]()
При
этом главный вектор пространственной
системы сил: R0 = ΣPi отличается
от главного вектора плоской системы сил только наличием третьей компоненты,
поэтому его модуль будет равен:
![]()
Главный момент пространственной системы сил: M0 = ΣM0(Pi) - это вектор, модуль которого находится аналогично:
![]()
где
Mx , My , Mz - суммы
моментов всех сил системы относительно соответствующих осей.
В
зависимости от значений главного вектора и главного момента, а также от их взаимного расположения возможны
следующие варианты приведения пространственной системы сил:
1)
R0 = 0, M0 = 0 - система сил находится в равновесии;
2)
R0 = 0, M0 ≠0 - система эквивалентна паре сил с моментом, равным главному
моменту системы, который в этом случае не зависит от выбора центра приведения;
3)
R0 ≠0, M0 = 0 - система эквивалентна равнодействующей R, равной и эквивалентной главному вектору системы R0 ,
линия действия которой проходит через центр приведения: R = R0, R~R0 ;
4)
R0 ≠0, M0 ≠0 и R0 ⊥
M0 - система эквивалентна равнодействующей R, равной
главному вектору системы R0 , ее линия действия проходит на расстоянии d = |M0|/R0 от
центра приведения.
5)
R0 ≠
0, M0 ≠0 и
главный вектор R0 неперпендикулярен главному моменту M0 - система эквивалентна скрещивающимся силам или динаме.
При
этом скрещивающимися называются силы,
которые непараллельны и не лежат в одной плоскости, а
динамой называется
система, состоящая из силы и пары сил, плоскость которой перпендикулярна этой
силе.
Динама,
приложенная к твердому телу, стремится вызвать его винтовое движение, которое
представляет совокупность вращательного и поступательного движений.
Примечание.
Для
пространственной системы сил, как и для плоской, справедлива следующая Теорема
Вариньона.
Момент равнодействующей пространственной
системы сил относительно произвольного центра (оси) равен геометрической
(алгебраической) сумме моментов всех сил этой системы относительно данного
центра (оси).
Условия
равновесия произвольной пространственной системы сил.
Произвольную пространственную
систему сил, как и плоскую, можно привести к какому-нибудь центру О и заменить одной результирующей силой ![]() и парой с моментом
и парой с моментом ![]() . Рассуждая так, что для
равновесия этой системы сил необходимо и достаточно, чтобы одновременно было R = 0 и Mо = 0. Но векторы
. Рассуждая так, что для
равновесия этой системы сил необходимо и достаточно, чтобы одновременно было R = 0 и Mо = 0. Но векторы ![]() и
и ![]() могут обратиться в нуль только тогда, когда
равны нулю все их проекции на оси координат, т. е. когда Rx = Ry
= Rz = 0 и Mx= My
= Mz = 0 или, когда действующие
силы удовлетворяют условиям
могут обратиться в нуль только тогда, когда
равны нулю все их проекции на оси координат, т. е. когда Rx = Ry
= Rz = 0 и Mx= My
= Mz = 0 или, когда действующие
силы удовлетворяют условиям
ΣXi = 0; ΣMx
(Pi) = 0;
ΣYi
= 0; ΣMy
(Pi) = 0;
ΣZi = 0; ΣMz
(Pi) = 0.
Таким
образом, для равновесия пространственной системы сил необходимо и достаточно, чтобы
суммы проекций всех сил системы на каждую из координатных осей, а также суммы
моментов всех сил системы относительно каждой из этих осей равнялись нулю.
В частных случаях системы сходящихся или параллельных
сил эти уравнения будут линейно зависимы, и только три уравнения из шести будут
линейно независимыми.
Например, уравнения равновесия системы сил,
параллельных оси Oz,
имеют вид:
ΣZi = 0;
ΣMx (Pi)
= 0;
ΣMy (Pi) = 0.
Задачи
на равновесие тела под действием пространственной системы сил.
Принцип решения задач этого
раздела остается тем же, что и для плоской системы сил. Установив, равновесие,
какого тела будет рассматриваться, заменяют наложенные на тело связи их
реакциями и составляют условия равновесия этого тела, рассматривая его как
свободное. Из полученных уравнений определяются искомые величины.
Для получения более простых
систем уравнений рекомендуется оси проводить так, чтобы они пересекали больше
неизвестных сил или были к ним перпендикулярны (если это только излишне не усложняет
вычисления проекций и моментов других сил).
Новым элементом в
составлении уравнений является вычисление моментов сил относительно осей
координат.
В случаях, когда из общего
чертежа трудно усмотреть, чему равен момент данной силы относительно какой-нибудь
оси, рекомендуется изобразить на вспомогательном чертеже проекцию рассматриваемого
тела (вместе с силой) на плоскость, перпендикулярную к этой оси.
В тех случаях, когда при
вычислении момента возникают затруднения в определении проекции силы на
соответствующую плоскость или плеча этой проекции, рекомендуется разложить
силу на две взаимно перпендикулярные составляющие (из которых одна параллельна
какой-нибудь координатной оси), а затем воспользоваться теоремой Вариньона.
Пример 6. Брус прямоугольного сечения жестко заделан одним
концом в вертикальную стену и нагружен на другом конце силой ![]() и парой сил с
моментом М (рис. 27). Определить
составляющие реакции заделки. Весом бруса пренебречь.
и парой сил с
моментом М (рис. 27). Определить
составляющие реакции заделки. Весом бруса пренебречь.
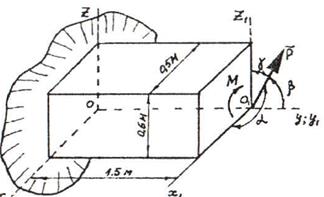
Рис.27
Решение. При действии на брус заданной силы ![]() и пары сил с
моментом М в сечении бруса,
совпадающем со стеной, возникнут силы, действующие со
стороны стены на брус. Эти силы после их приведения к центру O будут
состоять из силы
и пары сил с
моментом М в сечении бруса,
совпадающем со стеной, возникнут силы, действующие со
стороны стены на брус. Эти силы после их приведения к центру O будут
состоять из силы ![]() (главного
вектора) и пары сил с моментом
(главного
вектора) и пары сил с моментом ![]() . Силу
. Силу ![]() разложим на
составляющие
разложим на
составляющие ![]() пару сил с
моментом М0
разложим на составляющие пары с моментами Мх, Му и Мz (рис. 28). Брус под действием сил, показанных на рис.
28, будет находиться в равновесии.
пару сил с
моментом М0
разложим на составляющие пары с моментами Мх, Му и Мz (рис. 28). Брус под действием сил, показанных на рис.
28, будет находиться в равновесии.
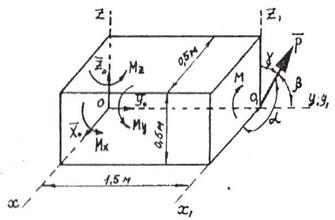
Рис.28
При определении моментов силы ![]() относительно
осей X, У и Z сначала
разложим на составляющие, параллельные координатным
осям, а затем воспользуемся теоремой Вариньона. При составлении уравнений моментов
учтем свойства пары сил: сумма моментов сил, составляющих пару, относительно
любой оси равна проекции на эту ось вектора, изображающего момент пары; сумма
проекций сил пары на любую ось равна нулю.
относительно
осей X, У и Z сначала
разложим на составляющие, параллельные координатным
осям, а затем воспользуемся теоремой Вариньона. При составлении уравнений моментов
учтем свойства пары сил: сумма моментов сил, составляющих пару, относительно
любой оси равна проекции на эту ось вектора, изображающего момент пары; сумма
проекций сил пары на любую ось равна нулю.
Составим уравнения равновесия бруса.
![]()
![]()
![]()
![]()
![]()
![]()
Для заданных исходных данных: Р=100 Н; М = 200 Нм; α=γ=60°; β=45° получаем следующие значения реакций заделки: Х0 = -50 Н; У0
= 70,7 Н; Z0 = -50 Н; R0 =
100 Н, Мх
= -75 Нм; Му= 200 Нм; Мz=15 Нм;
М0 = 226,4 Нм.
Пример 7. Однородная квадратная пластина АВСД весом Р=200
Н прикреплена одним концом к вертикальной стене при помощи сферического шарнира А и петли В. Пластина удерживается в
горизонтальном положении канатом СЕД, пропущенным через гладкое колечко Е, скрепленное со стенкой (рис.29).
Часть каната СЕ составляет с
плоскостью пластины угол α=30°. Определить
реакции связей.
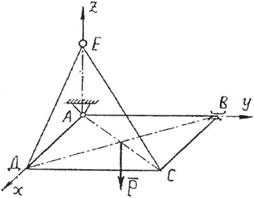
Рис.29
Решение. Рассмотрим равновесие пластины. Освободим ее от
связей, приложим к ней реакции связей ![]() (рис.30). Разложим
силы
(рис.30). Разложим
силы ![]() на составляющие
вдоль осей координат
на составляющие
вдоль осей координат
![]()
![]()
Из геометрических соотношений получаем:
![]()
![]()
![]()
![]()
где а
–сторона
квадратной пластины
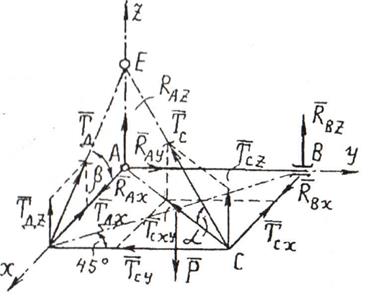
Рис.30
Условия равновесия пластины имеют вид
![]()
![]()
![]()
![]()
![]()
![]()
После решения
составленной системы уравнений получаем
RАX =122,5 Н; RАУ =54,1 Н; RAZ =44,1 Н; RBZ=55,9 Н; Т=88,3 Н.
Пример 8. Рама АВ (рис.31) удерживается в равновесии
шарниром А и стержнем ВС. На краю рамы
находится груз весом Р. Определим реакции шарнира и усилие в стержне.
Рис.31
Решение. Рассматриваем равновесие рамы вместе с грузом.
Строим расчётную схему, изобразив раму свободным телом
и показав все силы, действующие на неё: реакции связей и вес груза Р.
Эти силы образуют систему сил, произвольно расположенных на плоскости.
Желательно составить такие уравнения, чтобы в каждом
было по одной неизвестной силе.
Рекомендуется составлять уравнения моментов
относительно трёх точек, точек пересечения линий действия неизвестных сил.
![]() В
нашей задаче это точка А, где приложены
неизвестные
В
нашей задаче это точка А, где приложены
неизвестные ![]() и
и ![]() ; точка С, где пересекаются линии действия
неизвестных сил
; точка С, где пересекаются линии действия
неизвестных сил ![]() и
и ![]() ; точка D –
точка пересечения линий действия сил
; точка D –
точка пересечения линий действия сил ![]() и
и ![]() . Составим уравнение проекций сил на ось у (на ось х проектировать нельзя, т.к. она перпендикулярна прямой АС).
. Составим уравнение проекций сил на ось у (на ось х проектировать нельзя, т.к. она перпендикулярна прямой АС).
И, прежде чем составлять уравнения, сделаем еще одно
полезное замечание. Если на расчётной схеме имеется сила, расположенная так,
что плечо её находится непросто, то при определении момента рекомендуется
предварительно разложить вектор этой силы на две, более удобно направленные. В
данной задаче разложим силу ![]() на две:
на две: ![]() и
и ![]() (рис.31) такие,
что модули их
(рис.31) такие,
что модули их ![]()
Составляем уравнения: ![]()
![]()
![]()
Из второго уравнения находим
![]()
Из третьего
![]()
И из первого
![]()
Так как получилось S<0, то стержень ВС будет сжат.
Пример 9. Прямоугольная полка весом Р удерживается в горизонтальном положении двумя стержнями СЕ и СD,
прикреплёнными к стене в точке Е (рис.32,а). Стержни одинаковой длины, AB=2a, EO=a. Определим
усилия в стержнях и реакции петель А и В.
а) б)
б)
Рис.32
Решение. Рассматриваем равновесие плиты. Строим расчётную
схему (рис.32,б). Реакции петель
принято показывать двумя силами перпендикулярными оси петли: ![]() .
.
Силы образуют систему сил, произвольно расположенных в
пространстве. Можем составить 6 уравнений. Неизвестных - тоже шесть.
Какие уравнения составлять – надо подумать. Желательно
такие, чтобы они были попроще и чтобы в них было
поменьше неизвестных.
Составим такие уравнения:
![]()
![]()
![]()
![]()
![]()
![]()
Из уравнения (1) получим: S1=S2. Тогда из (4): ![]() .
.
Из (3): YA=YB и, по (5), ![]() . Значит
. Значит ![]()
Из уравнения (6), т.к. S1=S2, следует
ZA=ZB.
Тогда по (2) ZA=ZB=P/4.
Из треугольника ![]() , где
, где ![]() , следует
, следует ![]() ,
,
![]()
Поэтому ![]() YA=YB=0,25P, ZA=ZB=0,25P.
YA=YB=0,25P, ZA=ZB=0,25P.
Для проверки решения можно составить ещё одно уравнение
и посмотреть, удовлетворяется ли оно при найденных значениях реакций:
![]()
![]()
Задача решена
правильно.
Пример 10. На
горизонтальный вал насажено колесо радиусом r1
=
Рис.33
Решение. К
валу кроме силы Р,
действующей на рычаг СD, приложена
реакция веревки (сила натяжения) T, численно равная силе тяжести груза F, так как по
условию задачи трения в блоке нет (рис. 34, а).
Направлена эта реакция вдоль веревки в ту сторону, куда веревка тянет блок.
Реакции подшипников RA и RB, расположенные в плоскостях, перпендикулярных оси Аy,
разложим на составляющие по осям координат RAx, RAz, RBx и RBz. Направление реакций выбирается произвольно.
Рис.34
Для составления
уравнений равновесия рассмотрим вид с положительного направления координатных
осей, например с оси Ay (рис. 34, б).
Условия равновесия
пространственной системы сил:
![]()
![]()
![]()
![]()
![]()
![]()
Из последнего
соотношения найдем
![]()
Из пятого
соотношения определим
![]()
Из четвертого соотношения
вычислим

Из третьего
соотношения найдем
![]()
Из первого
соотношения найдем
![]()
Модули реакций
подшипников:
![]()
![]()
Для определения
направления реакции найдем угол между соответствующей реакцией и осью x:
![]()
![]()
Вопросы для самопроверки
- Какая конструкция называется фермой?
- Назовите основные составные элементы фермы.
- Какой стержень фермы называется нулевым?
- Сформулируйте леммы, определяющие нулевой стержень
фермы.
- В чем заключается сущность способа вырезания узлов?
- На основании каких соображений
без вычислений можно определить стержни пространственных ферм, в которых при
заданной нагрузке усилия равны нулю?
- В чем заключается сущность способа Риттера?
- Каково соотношение между нормальной реакцией
поверхности и силой нормального давления?
- Что называется силой трения?
- Запишите закон Амонтона-Кулона.
- Сформулируйте основной закон
трения. Что такое коэффициент трения, угол трения и от чего зависит их
значение?
- Брус находится в равновесии,
опираясь на гладкую вертикальную стену и шероховатый горизонтальный пол; центр
тяжести бруса находится в его середине. Можно ли определить направление полной
реакции пола?
- Назовите размерность коэффициента трения скольжения.
- Что такое предельная сила трения скольжения.
- Что характеризует конус трения?
- Назовите причину появления момента трения качения.
- Какова размерность коэффициента трения качения?
- Приведите примеры устройств, в которых возникает
трение верчения.
- В чем заключается разница между силой сцепления и
силой трения?
- Что называют конусом сцепления?
- Каковы возможные направления реакции шероховатой
поверхности?
- Что представляет собой область равновесия
и каковы условия равновесия сил, приложенных к бруску,
опирающемуся на две шероховатые поверхности?
- Что называется моментом силы относительно точки?
Какова размерность этой величины?
- Как вычислить модуль момента силы относительно
точки?
- Сформулируйте теорему о моменте равнодействующей
системы сходящихся сил.
- Что называется моментом силы относительно оси?
- Запишите формулу, связывающую момент силы
относительно точки с моментом этой же силы относительно оси, проходящей через
эту точку.
- Как определяется
момент силы относительно оси?
- Почему при определении момента силы относительно оси нужно обязательно
спроецировать силу на плоскость, перпендикулярную оси?
- Каким образом
нужно расположить ось, чтобы момент данной силы относительно этой оси равнялся
нулю?
- Приведите формулы для вычисления моментов силы
относительно координатных осей.
- Как направлен вектор момента силы относительно относительно точки?
- Как определяется на плоскости момент силы
относительно точки?
- Какой площадью можно определить числовое значение
момента силы относительно данной точки?
- Изменяется ли момент силы относительно данной точки
при переносе силы вдоль линии ее действия?
- В каком случае момент силы относительно данной точки
равен нулю?
- Определите геометрическое место точек пространства,
относительно которых моменты данной силы:
а) геометрически равны;
б) равны по модулю.
- Как определяются числовое значение и знак момента
силы относительно оси?
- При каких условиях момент силы относительно оси
равен нулю?
- При каком направлении силы, приложенной к заданной
точке, ее момент относительно данной оси наибольший?
- Какая зависимость существует между моментом силы
относительно точки и моментом той же силы относительно оси, проходящей через
эту точку?
- При каких условиях модуль момента силы относительно
точки равен моменту той же силы относительно оси, проходящей через эту точку?
- Каковы аналитические выражения моментов силы
относительно координатных осей?
- Чему равны главные моменты системы сил, произвольно
расположенных в пространстве, относительно точки и относительно оси, проходящей
через эту точку? Какова зависимость между ними?
- Чему равен главный момент системы сил, лежащих в
одной плоскости, относительно любой точки этой плоскости?
- Чему равен главный момент сил, составляющих пару,
относительно любой точки в пространстве?
- Что называется главным моментом системы сил
относительно заданного полюса?
- Как формулируется лемма о параллельном переносе
силы?
- Сформулируйте теорему о приведении произвольной
системы сил к главному вектору и главному моменту.
- Запишите формулы для вычисления проекций главного
момента на координатные оси.
- Приведите векторную запись условий равновесия
произвольной системы сил.
- Запишите условия равновесия произвольной системы сил
в проекциях на прямоугольные координатные оси.
- Сколько независимых скалярных уравнений равновесия
можно записать для пространственной системы параллельных сил?
- Запишите уравнения равновесия для произвольной
плоской системы сил.
- Сколько независимых уравнений равновесия можно записать для системы сходящихся сил в пространстве?
- Сколько независимых уравнений равновесия можно записать для системы параллельных сил в пространстве?
- Как записываются уравнения равновесия для системы пар сил, произвольно расположенных в пространстве?
- При каком условии три непараллельные силы,
приложенные к твердому телу, уравновешиваются?
- Каково условие равновесия трех параллельных сил,
приложенных к твердому телу?
- Каковы возможные случаи приведения произвольно
расположенных и параллельных сил в пространстве?
- К какому простейшему виду можно привести систему
сил, если известно, что главный момент этих сил относительно различных точек
пространства:
а) имеет одно и то же значение не равное нулю;
б) равен нулю;
в) имеет различные значения и перпендикулярен
главному вектору;
г) имеет различные значения и неперпендикулярен
главному вектору.
- Каковы условия и уравнения равновесия
пространственной системы сходящихся, параллельных и произвольно расположенных
сил и чем они отличаются от условий и уравнений равновесия такого же вида
сил на плоскости?
- Какие уравнения
и сколько их можно составить для уравновешенной пространственной системы
сходящихся сил?
- Запишите систему уравнений равновесия
пространственной системы сил?
- Каковы геометрические и аналитические условия
приведения пространственной системы сил к равнодействующей?
- Сформулируйте теорему о моменте равнодействующей
пространственной системы сил относительно точки и оси.
- Составьте уравнения линии действия равнодействующей.
- Какую прямую в пространстве называют центральной
осью системы сил?
- Дайте определение осевого момента силы.
- Как на практике вычисляется момент силы относительно оси?
- В каких случаях момент силы относительно оси равен нулю?
- Запишите формулы для вычисления моментов силы относительно координатных осей.
- Выведите уравнения центральной оси системы сил?
- Покажите, что две скрещивающиеся силы можно привести
к силовому винту.
- Сформулируйте теорему о приведении системы сил к центру.
- Что такое главный вектор системы сил?
- Как можно вычислить модуль главного вектора и определить его направление в пространстве?
- Зависит ли главный вектор от выбора центра приведения?
- В чем отличие между главным вектором и равнодействующей системы сил?
- Как зависит главный момент системы сил от выбора центра приведения?
- Перечислите частные случаи приведения системы сил к центру.
- Какова последовательность действий при приведении системы сил к центру?
- По какой формуле вычисляют наименьший главный момент
заданной системы сил?
- Запишите формулы для расчета главного вектора
пространственной системы сходящихся сил?
- Запишите формулы для расчета главного вектора
пространственной системы произвольно расположенных сил?
- Запишите формулу для расчета главного момента
пространственной системы сил?
- Какова последовательность действий при определении опорных реакций в случае действия на тело пространственной системы сил?
- Какова зависимость главного момента системы сил в
пространстве от расстояния центра приведения до центральной оси этой системы
сил?
- Относительно каких точек
пространства главные моменты заданной системы сил имеют один и тот же модуль и
составляют с главным вектором один и тот же угол?
- Относительно каких точек
пространства главные моменты системы сил геометрически равны между собой?
- Каковы инварианты системы сил?
- Каким условиям удовлетворяют задаваемые силы,
приложенные к твердому телу с одной и
двумя закрепленными точками, находящемуся в покое?
- Будет ли в равновесии плоская система сил, для
которой алгебраические суммы моментов относительно трех точек, расположенных на
одной прямой, равны нулю?
- Пусть для плоской системы сил суммы моментов
относительно двух точек равны нулю. При каких дополнительных условиях система
будет в равновесии?
- Сформулируйте необходимые и достаточные условия
равновесия плоской системы параллельных сил.
- Что такое моментная точка?
- Какие уравнения (и сколько)
можно составить для уравновешенной произвольной плоской системы сил?
- Какие уравнения
и сколько их можно составить для уравновешенной пространственной системы
параллельных сил?
- Какие уравнения
и сколько их можно составить для уравновешенной произвольной пространственной
системы сил?
- Изложите рекомендации предпочтительного выбора
моментных точек и объясните их.
- С чего рекомендуется начинать решение задачи на
равновесие системы сил?
- Как формулируется план решения задач статики на
равновесие сил?
email: KarimovI@rambler.ru
Адрес: Россия, 450071, г.Уфа, почтовый ящик 21
Строительная механика Сопротивление материалов
Прикладная механика Детали машин
Теория
машин и механизмов